
|
Display:
|
|
Spin Speed:
$\omega_Z$ =
0
rot/time
|
Axis Tilt Angle: $\theta$ =
deg
|
| Possible | Steady Precession Mode : , |
|
$\omega_X$ = 0 rad/time
|
$\omega_Y$ = 0 rad/time
|
|
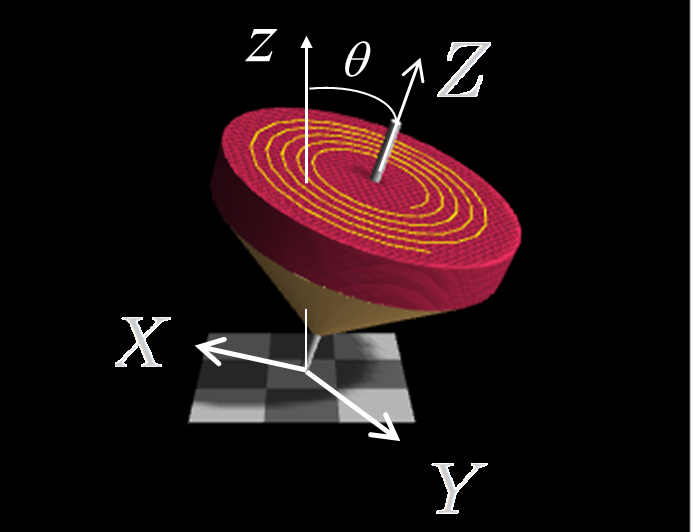
Symmetric Top Simulator :
The rotation axis is fixed at a point of contact with the floor.
Press the "Start" button to begin the simulation. Use sliders such as "Spin Speed" to set the initial conditions. The spin speed is the angular velocity around the spinning axis, positive for counterclockwise viewed from above, expressed as rotations per unit time. $\omega_X$ and $\omega_Y$ are the initial angular velocities around axes perpendicular to the spinning axis. All values are given in a unit system where the top's diameter, gravity, and density are all 1. For a certain range of spin speed $\omega_Z$ and tilt angle $\theta$, specific combinations of $(\omega_X,\omega_Y)$ produce a motion called steady precession, where the tilt angle remains constant. Given $(\omega_Z,\theta)$, there are two steady precession modes: slow and fast. If the "Steady Precession" checkbox is checked, suitable $(\omega_X,\omega_Y)$ will be chosen. If $(\omega_Z,\theta)$ doesn't allow steady precession, "NA" is shown. Click the "Trajectory" button to show the tip trajectory of the spinning axis. Click the "Sphere" button to show a mesh sphere where the axis tip moves. If you slightly change $(\omega_X, \omega_Y)$ from steady precession values, you will observe nutation, resulting in a two-period motion and complex trajectory. This combination of precession and nutation is characteristic to a spinning top with a fixed contact point. If the tip slips with finite friction, as shown in the simulator with friction, nutation and fast precession decay, settling into slow steady precession. If the tip has finite thickness as shown in the simulator with a thick spinning axis, precession also decays over time, and the top eventually stands still. |
|