2024/4,
Hiizu Nakanishi
モデルペンチの慣性モーメントの計算
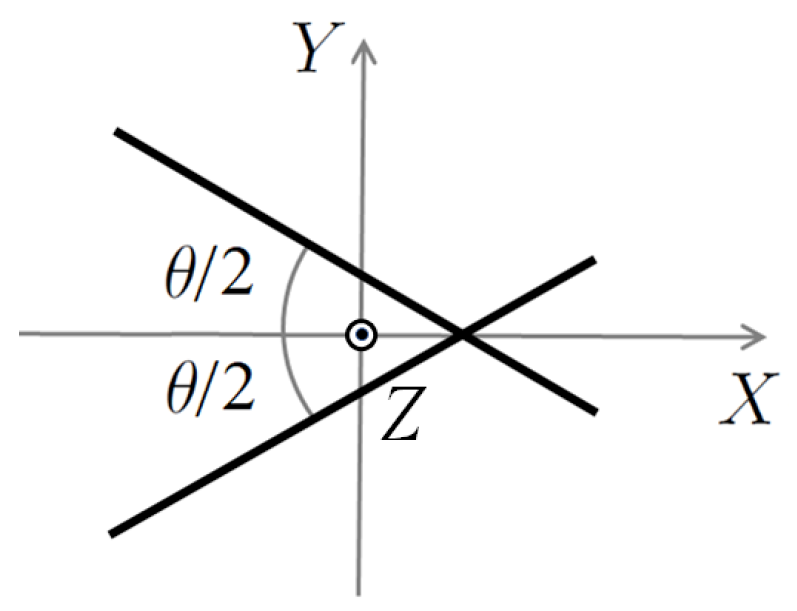
長さ$L$、質量$M/2$の2つの棒が、中点から$L_1$のところで角度$\theta$で
交差した物体の慣性モーメントを計算する。
棒の線密度は$\displaystyle \rho:={M\over 2L}$で与えられる。
棒の重心は$Y$軸上にあるので、
棒の両端の$X$座標を$\pm X_0$、交差点の$X$座標を$X_1$とすると、
\[ X_0 := {L\over 2}\cos{\theta\over 2},\qquad
X_1 := L_1\cos{\theta\over 2}
\]
である。それぞれの棒は、
\[ Y = \pm \tan{\theta\over 2}\,\big( X-X_1\big)\,; \quad
X \in \big[-X_0, X_0\big]
\]
にある。
主慣性モーメント
$I_X$, $I_Y$, $I_Z$は
\begin{align*}
I_X & = 2\int_{-X_0}^{X_0} dX\; \rho\; \sqrt{1+(dY/dX)^2}\; Y^2
% \\
% & =
% 2 \rho \sqrt{1+\tan^2{\theta\over 2}}\, \tan^2{\theta\over 2}
% \int_{-X_0}^{X_0} dX \big(X-X_1\big)^2
% \\
% & =
% {1\over 3} \sqrt{1+\tan^2{\theta\over 2}}\, \tan^2{\theta\over 2}
% \times
% {M\over L}\left( \big(X_0-X_1\big)^3 + \big(X_0+X_1\big)^3
% \right)
% \\ &
= {1\over 12 }\left( 1 + 12 \left({L_1\over L}\right)^2\right)
\sin^2{\theta\over 2}\; ML^2
\\ %-------------------------
I_Y & = 2\int_{-X_0}^{X_0} dX\; \rho\; \sqrt{1+(dY/dX)^2}\; X^2
% \\
% & = 2\rho \sqrt{1+(dY/dX)^2} \int_{-X_0}^{X_0} dX \, X^2
% =
% {2\over 3}\sqrt{1+\tan^2{\theta\over 2}}\, {M\over L}X_0^3
% \\ &
= {1\over 12}\,\cos^2{\theta\over 2}\ ML^2
\\ %-------------------------
I_Z & = I_X + I_Y
=
{1\over 12}\left( 1+ 12 \sin^2{\theta\over 2}\left({L_1\over L}\right)^2
\right) ML^2
\end{align*}
と求められる。
慣性乗積
$I_{XZ}$, $I_{YZ}$は、物体の質量が$XY$平面内に分布しているのでゼロ:
\[
I_{XZ} = I_{YZ} = 0
\]
$I_{XY}$は、
\[ I_{XY} = - \sum_{i=1}^N m_i X_i Y_i \]
であるが、質量分布が$X$軸に対して対称なので、
質点$(X_i, Y_i, m_i)$に対して、
質点$(X_i, -Y_i, m_i)$が存在する。
そのため、
\[
I_{XY}
=-\sum_{i=1}^{N/2}\Big( m_i X_i Y_i + m_i X_i \big(-Y_i\big)\Big) =0
\]
が示される。
慣性乗積が全てゼロとなるので、
$X$, $Y$, $Z$軸は慣性主軸である。