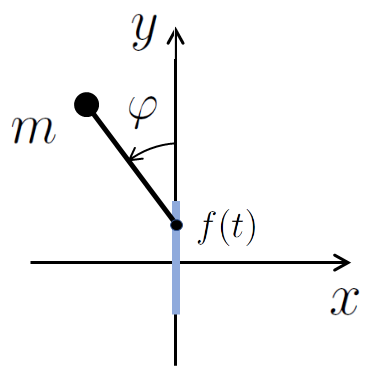
 まず最初に、支点に加えられた振動が上下方向で
\[ f(t) = f\sin(\Omega t)
\]
の場合を考える。
まず最初に、支点に加えられた振動が上下方向で
\[ f(t) = f\sin(\Omega t)
\]
の場合を考える。
式(2)を式(1)に代入すると、 \begin{align*} \ddot\Phi(t) + \textcolor{red}{\ddot\xi(t) } & = \left( \omega_0^2 + {\ddot f(t)\over \ell}\right) \sin\big(\Phi(t)+\xi(t)\big) \\ & \approx \left( \omega_0^2 + \textcolor{red}{{\ddot f(t)\over \ell}}\right) \Big( \sin\Phi(t) + \textcolor{red}{\xi(t)\, \cos\Phi(t)} \Big). \tag{3} \end{align*} と近似できる。ここで $\Phi\ll\xi$ を用いた。
$\xi(t)$ と $f(t)$ は角振動数 $\Omega$ で振動しているとして、 式(3)の中でこれらに関わる項の大きさを見積もると、 \[ \ddot\xi \sim \Omega^2\xi,\quad {\ddot f(t)\over\ell}\sin\Phi \sim \Omega^2{f\over\ell},\quad \omega_0^2\xi\cos\Phi\sim \omega_0^2\xi,\quad {\ddot f(t)\over\ell}\,\xi\cos\Phi \sim \Omega^2{f\over\ell}\,\xi \] となる。$\Omega\gg\omega_0,\; \xi\sim f/\ell$とすると、 これらの項の大きさについて \[ \ddot\xi,\quad {\ddot f(t)\over\ell}\sin\Phi \qquad\gg\qquad \omega_0^2\xi\cos\Phi,\quad {\ddot f(t)\over\ell}\,\xi\cos\Phi \] という関係が得られる。これなの項のうち大きい2つの項が釣り合っているとして、 \[ \ddot\xi(t) = {\ddot f(t)\over\ell}\,\sin\Phi(t) \] とし、更に $\Phi(t)$ がゆっくり変化する変数であることに注意して \[ \xi(t)\approx {f(t)\over\ell}\,\sin\Phi(t) \] と近似する。これを式(3)に代入して振動の周期 $2\pi/\Omega$ で平均すると \begin{align*} \ddot\Phi(t) & = \omega_0^2 \sin\Phi(t) + \omega_0^2\,\overline{\xi(t)}\,\cos\Phi(t) + \overline{\ddot f(t) f(t)\over \ell^2}\sin\Phi(t)\cos\Phi(t) \\ & = \omega_0^2 \sin\Phi(t) - {\Omega^2f^2\over 2 \ell^2}\sin\Phi(t)\cos\Phi(t) \\ & := -{d\over d\Phi} U_{\rm eff}(\Phi) \tag{4} \end{align*} を得る。ここで、$\overline{\xi(t)}=0$を用いた。また、 $U_{\rm eff}(\Phi)$ は遅い変数 $\Phi$ に対する実効ポテンシャルで、 \[ U_{\rm eff}(\Phi):= \omega_0^2\cos\Phi + {\Omega^2 f^2\over 4\,\ell^2}\sin^2\Phi \tag{5} \] である。 式(4)を単振り子の方程式の形に書き直すと \[ m\,{d\big(\ell\dot\Phi\big)\over dt} = -{d\over d(\ell\Phi)}\left( mg\ell\cos\Phi + \textcolor{red}{{1\over 2}m \overline{\big(\ell\dot\xi\,\big)^2 }} \right); \qquad \dot\xi(t) := {\Omega f(t)\over\ell}\sin\Phi \] となり、実効ポテンシャルの第2項は 外力による振動の運動エネルギーの時間平均と解釈できることがわかる。
式(5)を $\Phi$ で展開すると、 \[ U_{\rm eff} (\Phi) = \omega_0^2\left[ 1 +{1\over 2}\left( -1 + {1\over 2}\left({\Omega f\over\omega_0\ell}\right)^2\right)\Phi^2 + O\big(\Phi^4\big)\right] \] となるので、 \[ f\,\Omega > \sqrt 2\; \ell\,\omega_0 \] で倒立状態 $\Phi=0$ が安定となる。
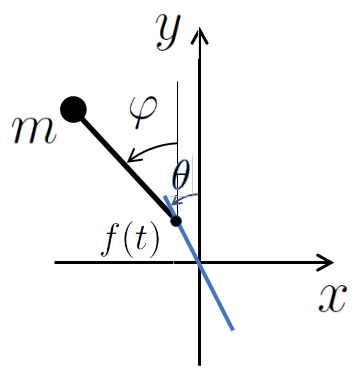 同様の解析をすると、実効ポテンシャルとして
\[
U_{\rm eff}(\Phi) =
\omega_0^2\cos\Phi
+ {\Omega^2 f^2\over 4\,\ell^2}\sin^2\big(\Phi-\theta\big)
\]
を得る。この外部振動によるポテンシャルは
$\theta$ および $\theta+\pi$ 方向で最小となることがわかる。
同様の解析をすると、実効ポテンシャルとして
\[
U_{\rm eff}(\Phi) =
\omega_0^2\cos\Phi
+ {\Omega^2 f^2\over 4\,\ell^2}\sin^2\big(\Phi-\theta\big)
\]
を得る。この外部振動によるポテンシャルは
$\theta$ および $\theta+\pi$ 方向で最小となることがわかる。